Products

E-U1LM200-XX Series Linear Motor Stages
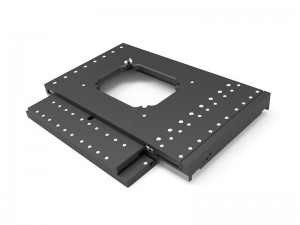
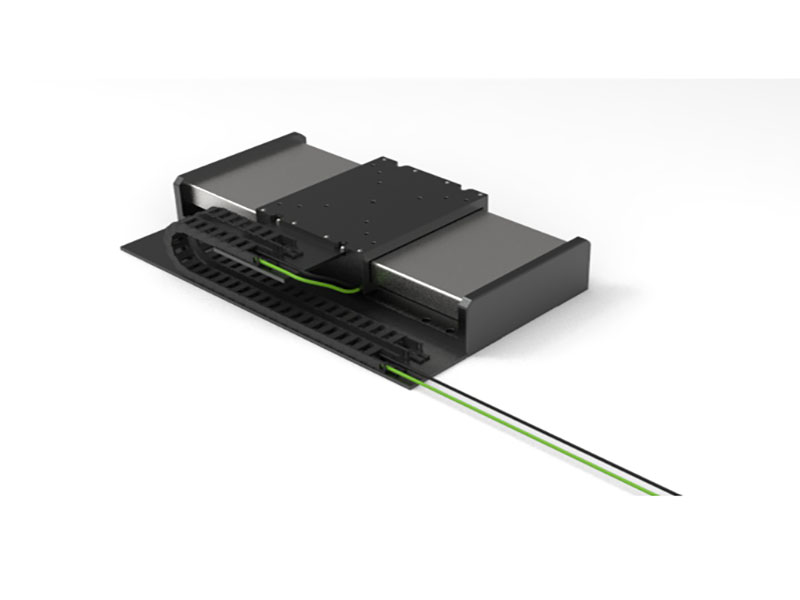
E-U1LM200-XX series is a cost-effective industrial linear motor displacement platform produced by our PRECISION-STAGE, it is a linear stage in its portfolio for industrial solutions that has a high load capacity and high dynamics. Its design is consistently geared to demanding industrial conditions and it is characterized by high stiffness and the use of high-quality components: Recirculating ball bearing guides, 3-phase linear motor, incremental linear encoder. The high resolution of the encoders allows an excellent tracking performance, small tracking errors, and short settling times. Industry-compatible connectors offer a fast and secure connectivity. The optional motion platform offers advantages especially in XY or XYZ combinations.
Magnetic Direct Drive
Three-phase magnetic direct drives use no mechanical parts in the drivetrain and transmit drive force directly to the motion platform without friction. The drives enable high speeds and high accelerations. Ironcore motors are ideal for positioning tasks with extremely high demands on precision, since they do not interact negatively with permanent magnets. This results in a smooth run even at the lowest speeds and at the same time, no vibrations at high speeds. Non-linear behavior of the control is avoided and each position is easily controlled. The driving force can be set arbitrarily.
Cutting Edge Design
The recirculating ball bearings in this series offer a higher load capacity for higher dynamics than competing brands. The high resolution of the encoder results in better tracking performance, smaller tracking errors and better settling times. For maximum flexibility, incremental and absolute encoders are available. Absolute encoders provide unambiguous position information, helping to determine position instantly. This means that no positioning is required during switch-on, increasing efficiency and safety during operation.
Cutting Edge Design

Laser cutting, scanning, digital printing, assembly and inspection of electronic components, AOI (automated optical inspection), automation, flat screen manufacturing. Applications with high demands on dynamics, precision, smooth scanning movement, short settling time and low tracking error.
|
Specification |
U1LM200-100 |
-200 |
-300 |
-400 |
-500 |
-600 |
-800 |
|
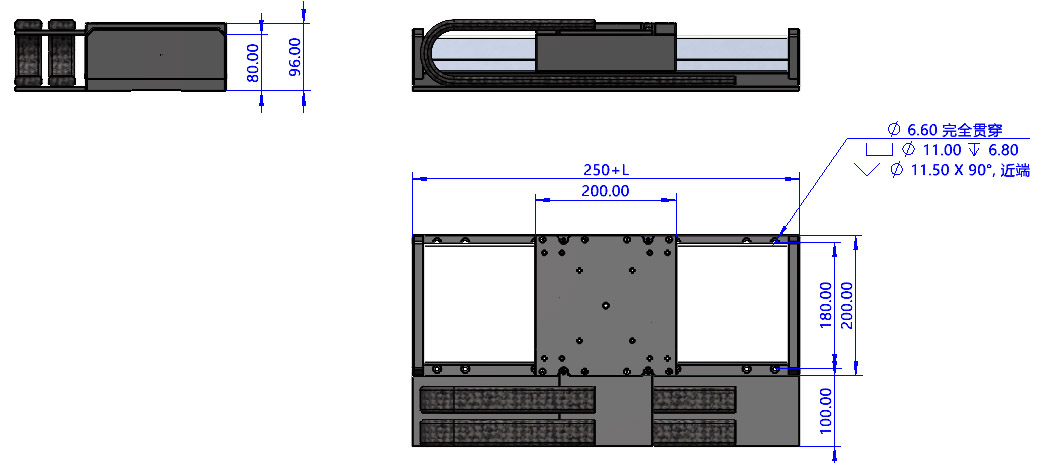
Effective skills [mm] |
100 |
200 |
300 |
400 |
500 |
600 |
800 |
|
Optical Incoder resolution [nm] |
100nm (standard digital quantity) optional other models Opticval Encode resolution or 1vpp analog quantity | ||||||
|
Repeatability [nm] |
≤±0.5um | ||||||
|
Positioning accuracy |
Uncalibrated ±4um/100mm (less than ±1.5um after calibration) | ||||||
|
Straightness [um] |
±1.5 |
±2.5 |
±3.5 |
±4 |
±5 |
±6.5 |
±8 |
|
Flatness um] |
±1.5 |
±2.5 |
±3.5 |
±4 |
±5 |
±6.5 |
±8 |
|
Motor thrust |
Continuous 132N/peak 232N | ||||||
|
Max speed |
2m /s | ||||||
|
Maximum acceleration |
3G | ||||||
|
Moving mass |
6.5kg | ||||||
|
Load Capacity-Horizonta[kg] |
40kg | ||||||
|
Load Capacity-Side [kg] |
20kg | ||||||
1) What is “Nanopositioning”?
A: In the not-too-distant past, the precision tail-end of the bell curve in automation was often colloquially referred to as the “micropositioning” segment of the market. The term microposition derives from the fact that high-precision positioning systems were routinely operating at the micron level. Manufacturers in this space were specifying key system attributes such as Bi-directional repeatability, Accuracy, and Stability in units of microns. Such systems sufficiently filled industry demands from Life Science and Diagnostics, to Non-contact metrology, to the Tech sectors of Semiconductor, Data Storage, and Flat Panel Display.
Fast forward to our present day and no longer are such systems sufficient. Evolving industry needs in microscopy and biotechnology demand evolving levels of performance from precision positioning equipment manufacturers. As the features of interest across markets become smaller, the ability to position at the nanometer level becomes a market imperative.
2) Does your product ship overseas?
A: Yes, we ship our products internationally and have distributors in designated areas.
3) How do I ask for a quote on a specific product?
A:You can send a email to us , we will make a official quotation to you.
4) Are the products customizable?
A: We provide the ultimate engineered motion solutions for our clients. In many cases this involves customizing or configuring our standard products to a client’s unique application and specifications. Please contact us if you’re interested in customizing or configuring one of our standard products, or if you’d like to work with our engineering team to design a unique solution to meet your needs of the feedback source. If this velocity is exceeded, the commutation initialization is no longer valid, and commutation must be reinitizlized.
5)What is gantry stages?
A: The gantry stages are designed to provide unsurpassed repeatability and excellent throughput under real world operating conditions. Our gantry stages are designed to move such items as inspection cameras, laser heads, or specific customer tooling over either removable substrates or fixtures mounted to the base of the system. The gantry base can be provided with mounting holes for interfacing a customer’s hardware to the stage. Due to its simplicity and ease of assembly, it is the ideal gantry stage configuration for OEMS and system integrators building machines for demanding applications. Many of Dover Motion’s standard screw driven and servo motor linear products can be integrated together as a gantry stage to achieve an application’s required accuracy and travel for XYZ motion.
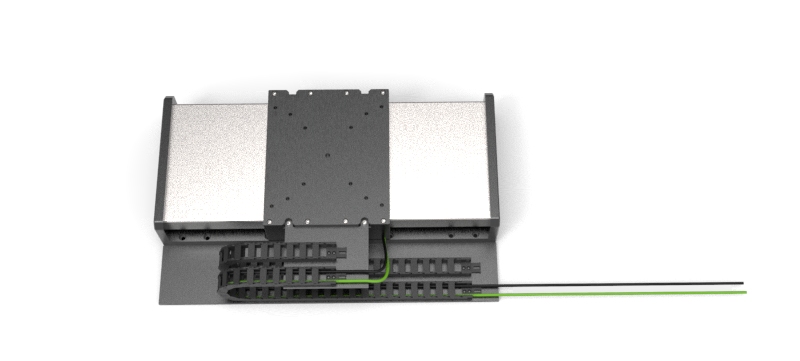
●Pre-formatted base for ease of integration;
●Risers to provide space between the base and moving beam;
●Integrated cable tracks and hi flex cable;
●All axes tested together and burned in to ensure performance and reliability requirements are met before shipment.